
-

超10亿元!浙江机器人,全球爆单
依托数字经济与高端智造双重优势,今年上半年,浙江机器人出海跑出亮眼增速,出口势头迅猛。据杭州海关统计,上半年浙江省工业机器人等各类机器人出口额超10亿元。其中,出口智能仿生机器人超过4亿元,出口额约占全国的六成。2026-07-22 -

全国首个机器人学校,在余杭开学!
30台机器人整齐列队,有的刚从生产线下来,透着一股“稚气”;2026-06-29 -
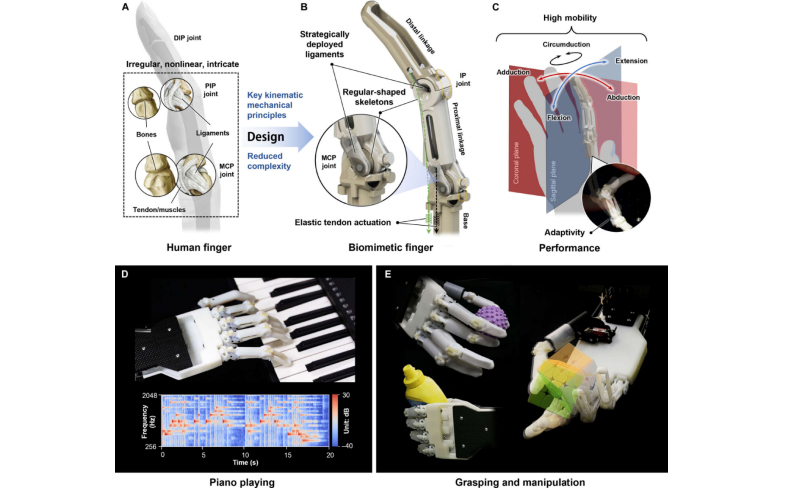
【前沿动态】Science Advances发表!上交大爆出机械手黑科技!软硬结合如何改写仿生机械手未来?
仿生机械手凭借高度灵活的关节设计和精准的抓取能力,在医疗康复、工业制造、特殊作业等领域展现出巨大的应用潜力。2025-05-21 -

【前沿动态】全球最小电动自主双足机器人问世
美国卡内基梅隆大学科研团队宣布研制出已知全球最小的电动自主微型双足机器人“Zippy”。这款机器人身高不足4厘米,凭借其精巧的机载电池、执行器与控制系统,不仅能自主启动,更能以每秒10步的速度完成行走、转弯、跳跃及攀爬等动作。相关成果发布在2025年美国电气电子工程师学会国际机器人与自动化会议上。2025-05-20 -
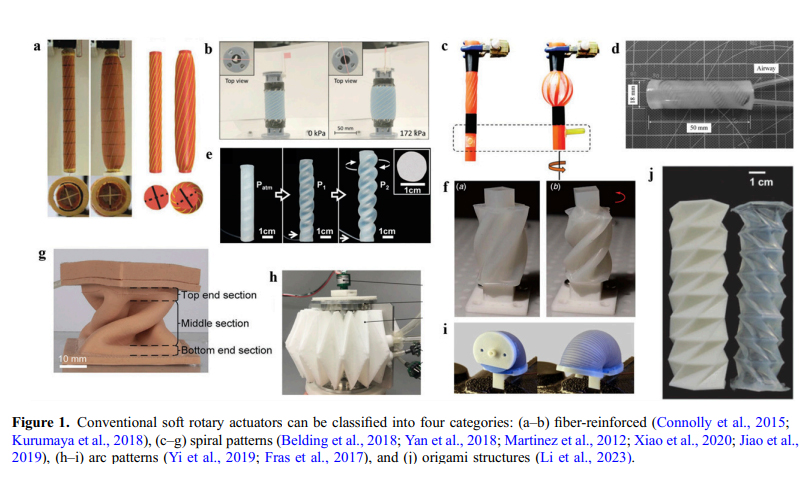
【前沿动态】机器人领域新突破!顶刊《IJRR》近期重磅论文概述
《International Journal of Robotics Research》(简称IJRR)创刊于1982年,是第一本有关机器人研究的学术出版物,也是当今机器人学领域的顶刊。IJRR致力于提供领域内杰出学者针对突破性前沿问题、技术发展和机器人学理论等方面研究撰写的开创性原创论文。惠及应用数学、人工智能、计算机科学,电气和机械工程等多个领域。本文对IJRR上近期发表的七篇精选论文进行了综述,涵盖软体驱动器、人机交互、机器人操作、双臂机器人、多机器人系统、人机协作、双足机器人运动控制等多个研究方向2025-05-14 -
【前沿动态】人形机器人「Pro化」:场景驱动下的功能进化与市场分野
在消费电子领域,十年前,智能手机市场被诺基亚的“全键盘机”与苹果的“触屏机”二分天下,而iPhone通过Pro、Plus、SE等系列精准切分用户需求,满足了不同用户对屏幕尺寸、摄像功能、处理性能的差异化需求,使其在全球市场大放异彩,成为行业场景分化的经典案例。2025-05-06 -
逐鹿具身智能 魔法原子的“快”与“慢” | 机器人产业链一线调研
尽管现阶段具身智能概念火爆异常,商业化路径仍面临诸多争议,机器人走进家庭生活究竟还有多远?每日经济新闻《机器人产业链一线调研》第二期实地探访魔法原子,近距离感受具身智能在未来五年的技术迭变与更多可能性。2025-04-21 -

【前沿动态】万亿基金!建厂增产!25年3月具身机器人产业5大热点事件
2025年成为人形机器人产业化元年,行业已突破早期实验室研发阶段,进入"场景验证+量产爬坡"新周期。相关数据显示,2024年,全球人形机器人市场规模约140亿元,本体制造企业超160家。高盛预测2035年全球产业规模将达到1万亿元;中国人形机器人产业本体企业超70家,市场规模约占全球1/3。2025-04-08 -

Advanced Intelligent Systems 综述论文:视触觉传感器的力测量技术
在视触觉传感领域,力测量技术一直都是是研究重点。近期,方斌教授团队发表的Advanced Intelligent Systems 综述论文2025-03-10 -

【前沿动态】Advanced Intelligent Systems 软体机器手助力截肢者玩转鼠标
随着科技的不断进步,假肢技术在改善截肢者生活质量方面取得了显著成就。然而,截肢群体在就业方面仍面临巨大困难,适龄截肢群体的就业率仅为健全群体的一半。现有的肌电控制假肢手在与计算机交互时存在诸多挑战,特别是截肢者在使用标准计算机外设(如鼠标)时,因假肢手的刚性结构及设备的不规则形状而导致操作困难,这直接影响了他们的工作效率和生活便利。2025-03-05 -
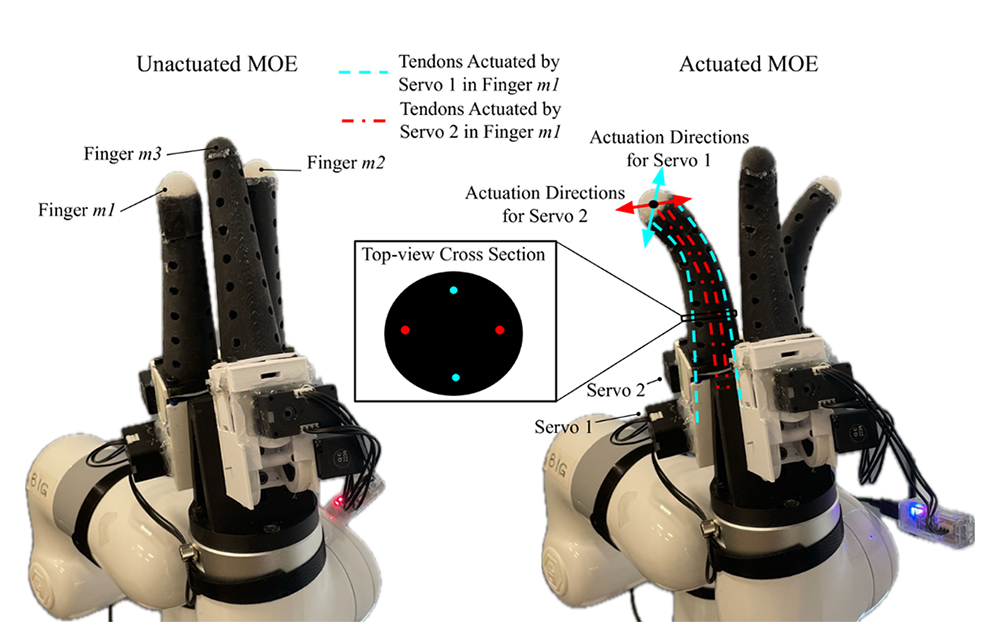
【前沿动态】成功率100%!卡内基梅隆大学机器人研究所提出SWIFT系统,实现仅凭现实交互学习复杂技能!
手部灵活性在人们的日常生活中至关重要,尤其是在需要重新调整物体方向或重新抓握的任务中。软机器人末端执行器因其可变形手指的柔韧性,能够在与周围环境互动时表现出良好的适应性和安全性。然而,这种柔韧性也使得软机器人在执行高度动态任务时面临困难。例如,旋转笔等快速操作任务对软机器人系统来说仍然是一个巨大的挑战。2025-02-25 -

【观展通知】 我会会员单位科钛机器人邀您共启2024 CeMAT Asia之旅
号外!号外!CeMAT Asia 2024 将于11月5-8日在上海新国际博览中心举行 作为自主移动机器人核心控制技术领跑者 科钛机器人将携最新产品及方案闪亮登场2024-10-21 -

【前言动态】人工智能+制造”行动加速落地,这些机器人头部企业有望优先受益
人工智能正从技术奇点迈向经济奇点,并逐步在政策助推下激活新质生产力。10月8日,《人民日报》刊发对工业和信息化部党组书记、部长金壮龙的采访,全方位阐述了人工智能与制造业的密切关联和行动路径,展现了国家对于助力制造业加快数字化转型的基础定调和决心。2024-10-21 -

RAL论文:基于弹性体形变仿真的视触觉传感器仿真器Tacchi
近期伦敦国王学院罗山教授和清华大学计算机系方斌在IEEE RAL联合发表了“视触觉传感器仿真”的论文研究工作"2024-09-04 -
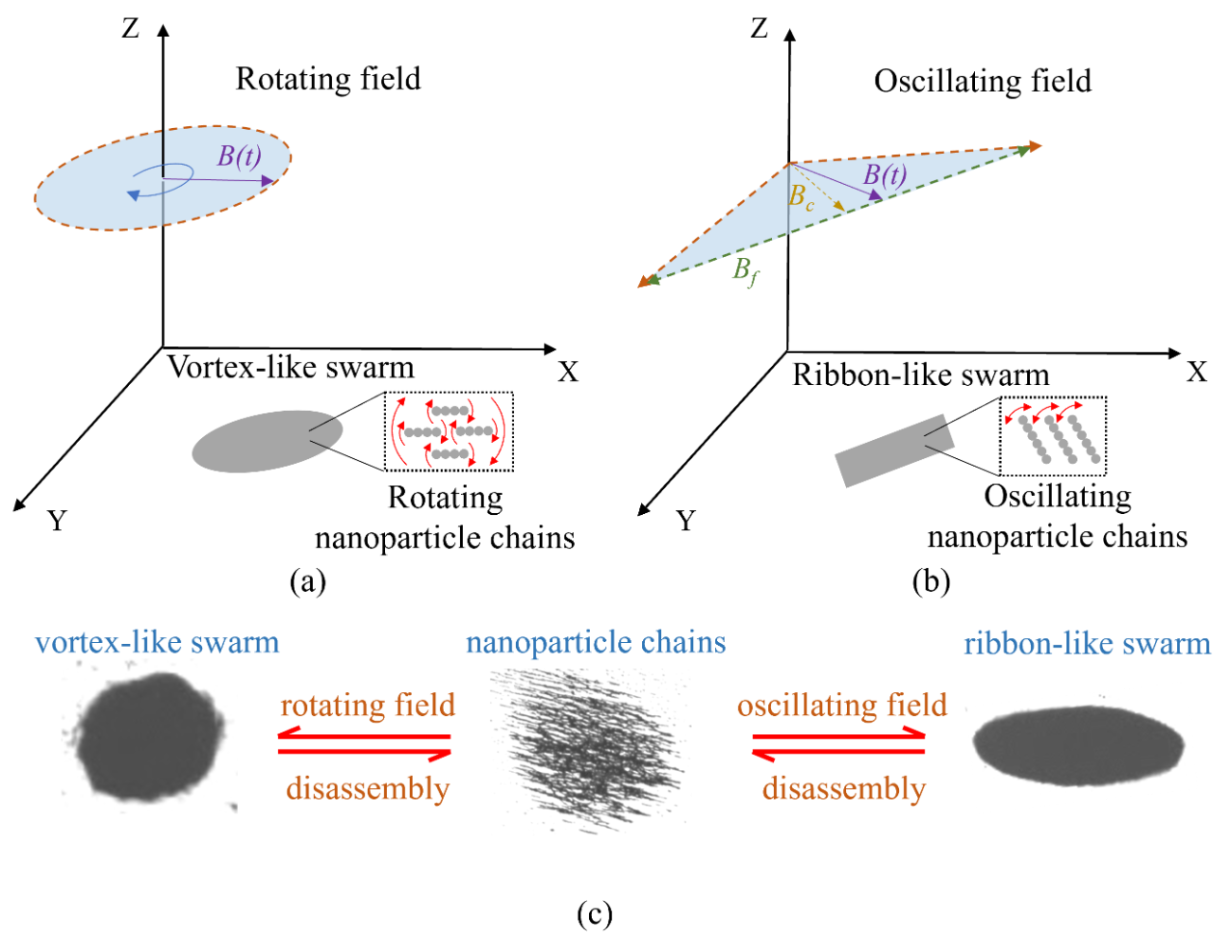
IEEE TRO发表!香港中文大学团队提出可重构微纳机器人集群方案,实现高精度自动化微操作!
在工业和医疗领域,微操作技术都扮演着至关重要的角色。该技术在微米级别的精确度下,能够将物体准确地递送到目标区域,为微组装、细胞操作以及靶向治疗等任务开辟了新的途径。2024-09-02 -

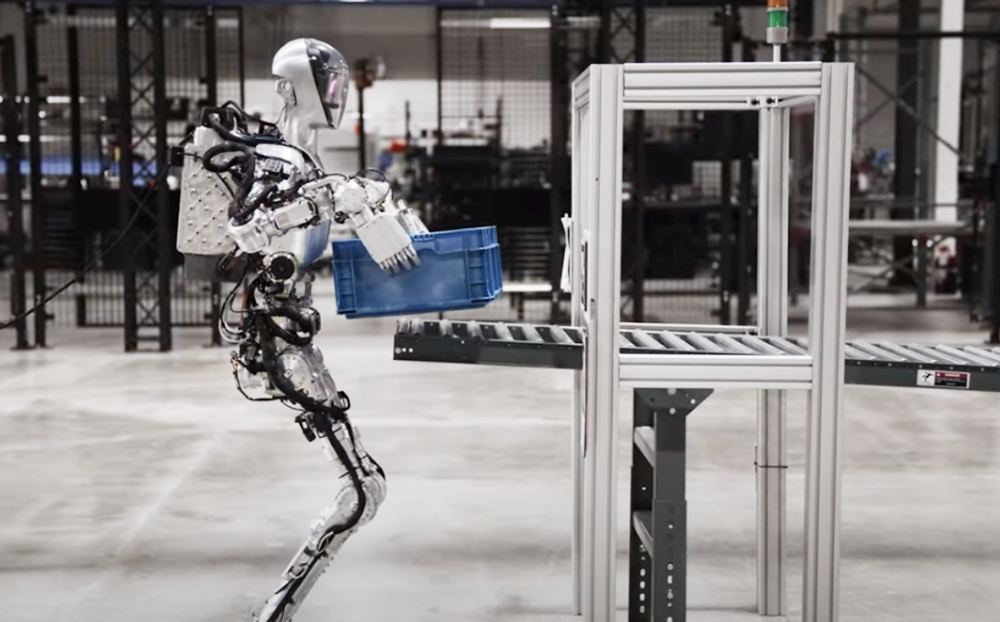
震惊!双足机器人界“跑步冠军”转行了,改组团搬砖了!
还记得那个曾创下百米赛跑世界记录的双足机器人界“博尔特”吗?2024-08-07 -

触觉人手助推人形机器人流行?英国布里斯托大学机器人实验室提出SimPLE方法,实现触觉机器人手更高灵巧性!
人形机器人正逐渐成为科技和投资界的热门话题,吸引众多投资者关注与涌入,他们坚信,人形机器人能够在劳动力短缺问题突出的行业,如制造业、航运、物流、仓储和零售等领域,有效替代人类完成体力劳动。2024-07-16 -

《Nature》发表!北卡大学苏浩团队创新人工智能“仿真中学习”框架,实现让机器人感知人类“多种”意图!
外骨骼机器人在助力行走方面展现出显著效果,然而其实际应用却大多局限于实验室环境内。2024-06-25 -

“潮酷”人形机器人现身全球最大众筹平台,香港公司Mark X引关注
最近,在全球最大的众筹平台Kickstarter上,一批看起来别具风格的人形机器人Mark X引起了小编的关注。2024-06-04 -
南航×蒙特利尔研发团队联合推出核磁成像环境下压电机器人系统驱动的DFN-D系统,有望解决MRI治疗痛点!
随着人口老龄化、生活方式变化以及环境因素的影响,癌症成为全球健康的主要威胁之一。2024-05-15 -

无辐射血管介入治疗!澳门大学IEEE T-RO发布多臂协作超声引导的磁控变刚度导管机器人
前不久,来自澳门大学科技学院徐青松教授团队的研究人员结合同心管机器人及磁控变刚度技术,提出一种以多段同心管为基础的变刚度磁控动脉介入导管机器人。2024-05-08 -
全部开源!马普所机械臂快到重影,乒乓球扣杀球速20m/s!
这个机械臂算是把乒乓球扣杀玩明白了:一挥拍子,球速高达20m/s,给对手吓得躲到了一边...2024-04-27 -

丝杠行业专题:人形机器人带来新机遇,丝杆行业国产替代加速进行
丝杠是工具机械和精密机械上最常用的传动元件,其主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反复作用力,同时兼具高精度、可逆性和高效率的特点。2024-04-16 -

壁虎材料在机器人领域如何大规模商用?IEEE Spectrum发文讨论“壁虎夹爪”及其清洁装置
近日,IEEE旗下的旗舰杂志IEEE Spectrum在其机器人专栏发布了文章...2024-04-10 -
超人类平均水平!伯克利双足机器人2分34秒刷新纪录,还能跳1.4远
近日,一则关于双足机器人创造400米新纪录的消息刷爆了科技圈。2024-04-08 -
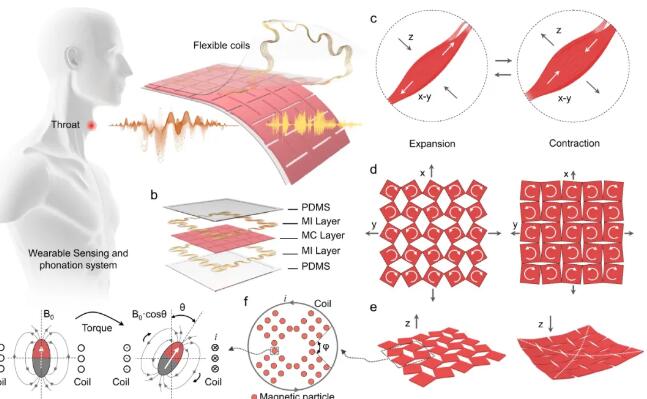
加州大学重磅技术成果 利用AI技术首次实现无声带讲话功能 准确度94.68%
对于声带病变和喉癌手术恢复期患者来讲,通过声带讲话是一件非常困难的事情,科学家们一直都在探索帮助患者突破发声困难和失声的问题。2024-04-02 -
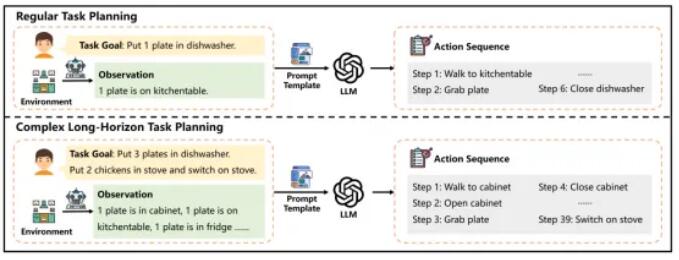
MLDT:一种基于开源大模型针对复杂长期机器人任务规划的多级 分解方法
在数据驱动的人工智能领域,开源大模型在机器人任务规划方面的应用具有里程碑意义。2024-03-26 -
北理工联合牛津大学团队综述:交叉频率耦合和智能神经调节
脑机接口、人机融合技术不仅可以帮助残障人士恢复行动能力,还可用于治疗帕金森病和癫痫等的神经系统疾病。2024-03-20 -

MIT CSAIL实验室新作:发布自适应触觉手套技术,实现触觉交互和传输
在日常生活中,我们大多数人对视觉和听觉的依赖已经成为一种常态,往往没有给予触觉足够的重视。2024-03-14 -

顶刊重磅!华中科大/上海交大/中科大:机器人化血管栓塞新进展!
动脉瘤和脑肿瘤的一种微创治疗方法通常涉及外科医生通过股动脉插入一根细长的导管,再引导该导管通过复杂的血管网络输送栓塞剂。2024-03-11
0571-26255920
0571-26255921
扫码关注
了解更多精彩资讯
